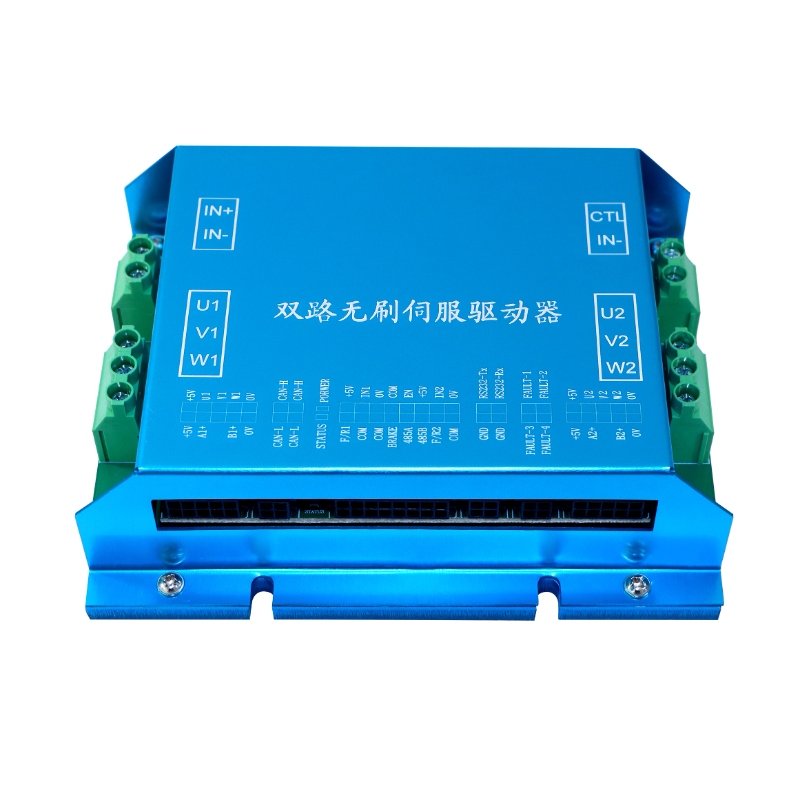
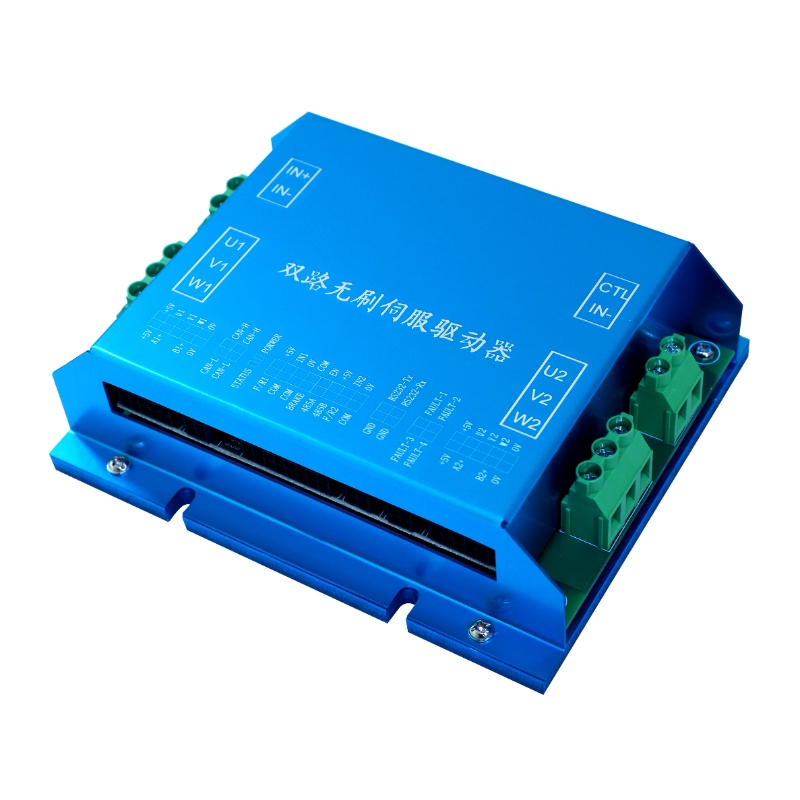
Интеллектуальный контроллер бесщеточного двигателя
Рабочее напряжение: 24 В/48 В постоянного тока
Максимальное напряжение питания: 16–55 В постоянного тока
Регулируемая мощность двигателя: 600–1000 Вт
Номинальный ток: 30А
Время перегрузки по току: 500 мс
Обратная связь по сигналу: инкрементальный энкодер, обратная связь по датчику Холла
Двухканальное независимое управление.
Интеллектуальный алгоритм ПИД-регулирования движения.
Независимый режим работы двух двигателей и смешанный режим.
Описание продукта:
KYDBL4860-2E — это аИнтеллектуальный контроллер бесщеточного двигателя. Драйвер бесщеточного двухдвигательного двигателя может одновременно управлять двумя бесщеточными двигателями постоянного тока. Он использует 32-битный высокопроизводительный микроконтроллер и усовершенствованный алгоритм обработки движения для реализации функции внутреннего электрического дифференциального управления. Контроллер использует сигнал Холла внутри двигателя в качестве обратной связи по положению ротора и работает с сигналом внешнего инкрементального энкодера (1000–2500 линий) для управления движением двигателя, реализуя режимы скорости без обратной связи, с обратной связью, режим положения и режим крутящего момента. Он имеет двусторонний независимый чип драйвера, двусторонний чип обработки энкодера, двусторонний чип обработки сигнала Холла. Кроме того, он имеет несколько функций сигнализации о неисправностях.Имеет два режима работы: независимый режим и смешанный режим.
янезависимый режим:Он может реализовать полностью независимое управление двусторонним двигателем, а управляющая часть управляется двусторонними входными сигналами. Двусторонний бесщёточный двигатель постоянного тока может управлять скоростью и направлением вращения двигателя независимо.
Мфиксированный режим:Он может осуществлять синхронное управление (вращение вперед, назад, влево и вправо) двумя бесколлекторными двигателями.
Управляющий сигнал имеет целых 8 режимов (беспроводное дистанционное управление, качелька, потенциометр, аналоговая величина, частота, ширина импульса, RS232, шина CAN). 
Параметры продукта:
Модель |
KYDBL4860-2E |
Параметры |
|
Рабочее напряжение |
24 В/48 В постоянного тока |
Предельное напряжение питания |
16-55 В постоянного тока |
Адаптируемая мощность двигателя |
600 Вт-1000 Вт |
Номинальный ток |
30А |
МгновенныйМаксимальныйТок |
60А |
Время перегрузки по току |
500 мс |
Обратная связь по сигналу |
Инкрементальный энкодер, обратная связь по датчику Холла |
Рабочий режим |
Режим скорости, режим крутящего момента, режим положения |
Метод охлаждения |
Естественное охлаждение |
Метод управления |
RS232; CAN2.0; RC; 0-5 В; ШИМ |
Рабочая температура. |
-25℃-+60℃ |
Температура хранения. |
-35℃-+65℃ |
Изоляционные свойства |
Выход и вход изолированы от корпуса до постоянного тока 600 В, ток утечки составляет 0,07 мА, сопротивление изоляции более 20 МОм. |
Защитные свойства |
Защита от пыли, влаги и солевых брызг |
Защитная функция |
Задержка по току/Перенапряжение/Пониженное напряжение/Перегрев/Короткое замыкание |
Диапазон контролируемой скорости |
0-6000 об/мин |
Уровень защиты |
IP20 |
Измерение |
190*130*45 мм |
Масса |
1,64 кг |
Стандарт жгута проводов |
1М |
Особенности продукта:
Широкий диапазон входного напряжения, 16–55 В, максимальное предельное напряжение 60 В.
Интеллектуальный контур ПИД-регулирования.
Режим работы: разомкнутый контур управления скоростью, замкнутый контур управления, замкнутый контур управления крутящим моментом, замкнутый контур управления положением.
Внешний потенциометр, аналоговый сигнал 0-5 В или режим управления импульсными командами, режим управления RC (широтно-импульсный сигнал, выдаваемый приемником дистанционного управления авиамоделированием).
Безопасное управление вперед и назад, работа в четырех квадрантах, поддержка регенерации.
Включить функцию управления.
Максимальный контроль тока.
4-канальный входной порт; функция может быть определена как аналоговый вход, импульсный вход или цифровой вход.
6-канальный цифровой выход (МОП-транзистор с открытым стоком), который может служить выходом сигнализации о неисправности контроллера и может управлять внешним реле для реализации таких действий, как автоматическое отключение питания.
Такие отклонения от нормы, как перегрузка по току, перегрев, перенапряжение и короткое замыкание, приведут к срабатыванию функции защиты.
Светодиодный индикатор состояния.
Связь по шине CAN, при ее использовании ознакомьтесь с подробным протоколом связи.
Связь RS232, при ее использовании ознакомьтесь с подробным протоколом связи.
Связь по USB, при ее использовании ознакомьтесь с подробным протоколом связи.

Современное оборудование и мастерская:

Сертификат:

ЧАСТО ЗАДАВАЕМЫЕ ВОПРОСЫ: